https://cloud.tencent.com/developer/news/2464163
目录
总结一
一、智能网联汽车的三大网络领域
文章开篇将智能网联汽车的网络划分为三个层次,这是一个很好的框架:
| 网络类型 | 通信范围 | 核心用途 | 关键技术举例 |
|---|---|---|---|
| 1. 车载网络 (车内网) | 车辆内部 | 电子控制单元(ECU)之间的数据交互,实现车辆基本控制与功能。 | CAN, LIN, FlexRay, 车载以太网 |
| 2. 车载自组织网络 (车际网) | 车与车/路/人之间 (V2X) | 短距离、低延迟的车辆与环境通信,主要用于安全预警和辅助驾驶。 | DSRC, C-V2X |
| 3. 车载移动互联网 (车云网) | 车与云端/互联网 | 远距离通信,提供信息娱乐、远程服务、OTA升级等。 | 4G/5G, 卫星通信 |
二、深入理解:车载网络(车内网)的演进
文章重点介绍了车内总线的几种类型,并做了速率与成本的对比图。这是理解汽车电子电气架构(EEA,Electrical/Electronic Architecture)演进的基础。我们可以把这些技术看作不同时代的产物,它们至今仍在共存演进。
1. 传统车载网络 (面向信号)
这些是过去20年汽车电子的基石,主要特点是面向信号和事件触发。
- LIN (局部连接网络)
- 定位:低速子网,成本极低。
- 应用:车窗、座椅、后视镜、雨刮等简单开关控制。
- 与我们之前讨论的关系:它是最基础的执行器网络,通常通过网关(如ZCU)与更高速的网络(如CAN、以太网)相连。
- CAN (控制器局域网络)
- 定位:车载网络的中流砥柱,可靠性高,成本适中。
- 应用:
- 高速CAN:动力系统(发动机、变速箱)、底盘控制(ABS,制动防抱死系统)。
- 低速CAN:车身舒适系统(门窗、灯光)。
- 与我们之前讨论的关系:传统ECU主要通过CAN通信。但在新架构中,域控制器或区域控制器(ZCU)会作为CAN网络与车载以太网的网关。
- FlexRay
- 定位:为高可靠性和确定性设计的先驱。
- 应用:线控系统(如奥迪的动态控制)、高级底盘集成控制。
- 与我们之前讨论的关系:它追求的“时间确定性”目标,正是现在TSN(时间敏感网络)要在大带宽以太网上实现的。FlexRay可以看作是TSN在低速时代的预演。
2. 多媒体与面向服务网络
随着信息娱乐和ADAS(高级驾驶辅助系统)的兴起,对带宽和灵活性提出了更高要求。
- MOST (多媒体定向系统传输)
- 定位:专为音视频多媒体设计的环形网络。
- 应用:车载娱乐系统、导航、后座娱乐。
- 与我们之前讨论的关系:随着车载以太网(特别是AVB)的成熟,MOST因其高成本和封闭性,正逐步被以太网取代,因为以太网能更好地融合多媒体和控制系统。
- 车载以太网 (Ethernet)
- 定位:未来的主干网络,提供高带宽和灵活性,支持面向服务的架构(SOA,Service-Oriented Architecture)。
- 应用:ADAS传感器融合(摄像头、雷达)、OTA升级、域控制器/中央计算单元间通信、ZCU主干网。
- 与我们之前讨论的关系:这正是我们之前深入探讨的领域。
- DoIP(基于IP的诊断) 运行在以太网上,实现高速诊断和刷写。
- AVB/TSN 为以太网增加了音视频同步和时间确定性,使其能承载ADAS实时控制和多媒体流。
- DDS(数据分发服务)和 SOME/IP 作为应用层协议,运行在以太网上,实现服务发现和数据分发,是SOA的基石。
三、总结:一张演进的全景图
我们可以用一张演进路线图,来串联所有这些技术:
- 第一阶段 (功能车):以CAN/LIN为核心,ECU独立工作,面向信号。典型的分布式架构。
- 第二阶段 (网联车):引入MOST/FlexRay 满足特定需求,开始出现车载移动互联网(3G/4G),提供基础网联服务。
- 第三阶段 (智能车 - 当前与未来):车载以太网成为主干。TSN提供实时性保证,DDS/SOME/IP实现软件服务化,DoIP支撑OTA,V2X(车与外界通信)融入体系。域控制器和区域控制器(ZCU)成为计算和通信的核心节点。
核心理解:你之前关注的DoIP、TSN、DDS/SOME-IP,都是第三代智能车网络架构(以车载以太网为基础)中的关键组件,分别解决服务交互(应用层)、实时调度(链路层)和大数据诊断(应用层) 的问题。而文章介绍的CAN、LIN等传统技术,则作为底层执行网络,通过ZCU等网关与这个高速以太网主干相连,构成了一个完整、分层的现代车载网络系统。
总结二
一、车载网络演进全景图
汽车电子电气架构(EEA)的演进是车载网络发展的根本驱动力,它决定了网络采用何种拓扑、何种技术。
| 架构阶段 | 核心特征 | 网络技术 | 典型代表 |
|---|---|---|---|
| 分布式 | 每个功能对应一个ECU,ECU之间通过CAN/LIN总线简单互联,线束复杂且重。 | CAN, LIN | 早期车型,功能固化,无法OTA。 |
| 域集中式 | 按功能域(如动力、底盘、座舱)将相近的ECU功能整合进域控制器(DCU),简化了拓扑。 | CAN, FlexRay, MOST, 初代车载以太网 | 特斯拉Model 3(三大域控制器),大众MQB平台。 |
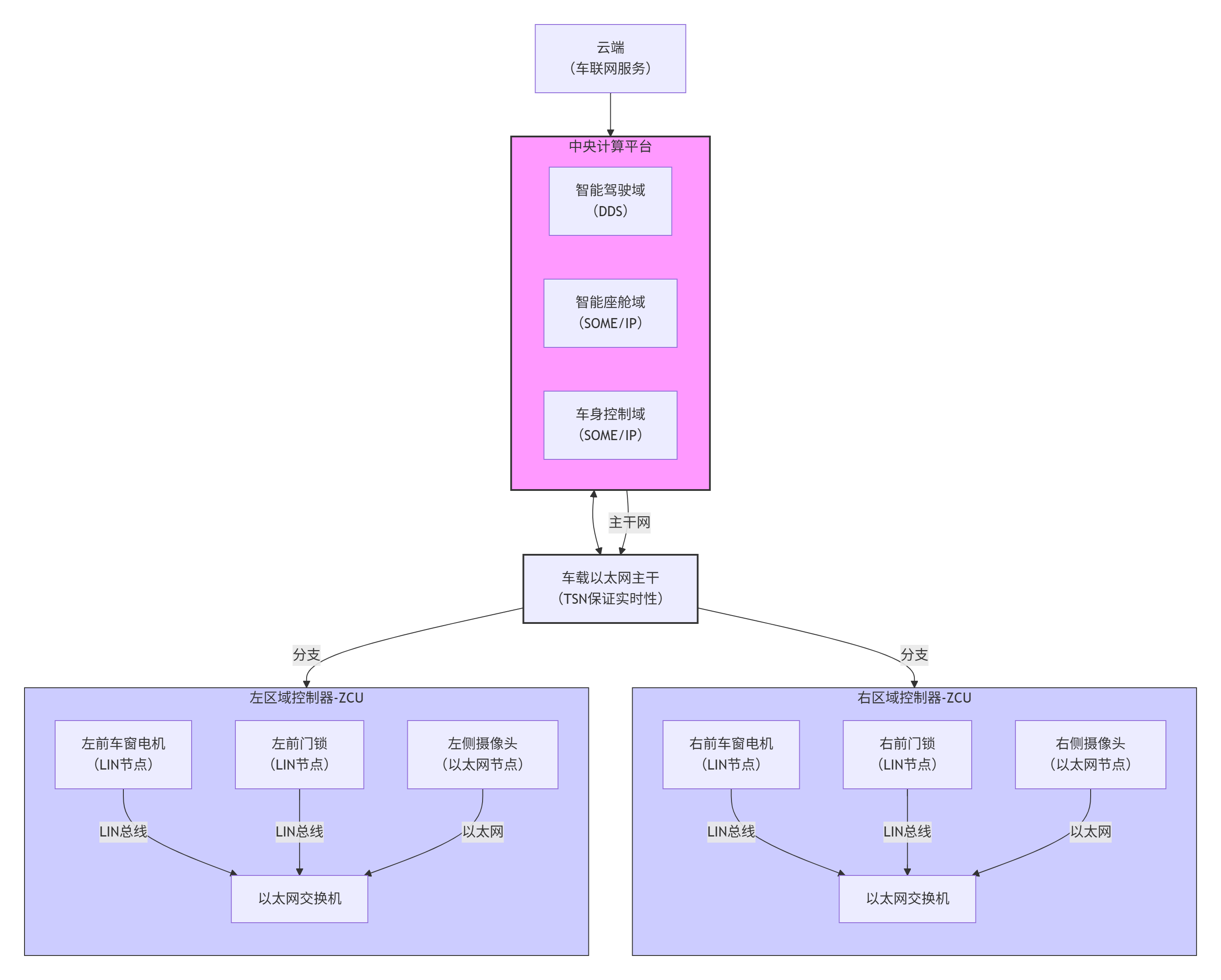
| 中央计算式 | 由1-2个中央计算单元(HPC)负责核心算力,由区域控制器(ZCU)负责IO、配电和通信,形成“中央计算+区域控制”的物理架构。 | 车载以太网作为主干,配合TSN;底层沿用CAN/LIN连接传感器/执行器;DDS/SOME/IP作为应用层协议。 | 大众SSP平台,英伟达DRIVE平台。 |
这张图清晰地展示了,车载网络正在从一个由CAN总线主导的“低速总线组合”,演进为一个以车载以太网为骨干、多种协议协同、由软件定义的统一通信系统。
二、逐层深入:关键网络技术详解
1. 经典网络技术:基石与补充
这些技术至今仍在可靠地服务于车辆的基础控制,并在新架构中作为区域控制的末端网络存在。
| 技术 | 速率 | 特点与工作原理 | 典型应用 | 网络层级定位 |
|---|---|---|---|---|
| LIN | 最高20 kbps | 低成本、主从架构。一个主节点控制多个从节点,通信简单,无需复杂协议。 | 车窗、座椅、门锁、后视镜等非实时控制。 | 执行器/传感器子网 |
| CAN | 125 kbps ~ 1 Mbps | 多主广播、基于优先级的仲裁。节点无主从之分,通过标识符(ID)决定谁能占用总线,高优先级消息延时极低(如134μs)。 | 动力总成(高速CAN)、车身舒适(低速CAN)、诊断。 | 控制域主干/子网 |
| FlexRay | 10 Mbps | 时间触发、确定性通信。采用静态时分多址(TDMA)和动态段结合,具备容错能力,是TSN的前身。 | 线控系统(刹车、转向)、底盘集成控制(如奥迪A8)。 | 关键控制主干 |
| MOST | 可达150 Mbps | 环形拓扑、面向多媒体。使用光纤,能高效同步传输音视频流、控制数据。 | 信息娱乐系统、导航、后座娱乐。 | 多媒体子网 |
2. 车载以太网:新一代主干网络
以太网解决了传统总线带宽不足的问题,成为新架构的物理基础。
- 物理层标准:为了适应汽车严苛的EMC和轻量化要求,车载以太网采用单对非屏蔽双绞线进行传输。主要标准包括:
- 100BASE-T1:速率100 Mbps,广泛应用于诊断、ECU刷新和摄像头数据传输。
- 1000BASE-T1:速率1 Gbps,用于ADAS传感器(高清摄像头、雷达)数据汇聚和高分辨率显示。
- 10BASE-T1S:最新标准,速率10 Mbps,支持多点共享总线架构,旨在替代部分低速CAN和LIN,实现“以太网到边缘”。
- 2.5/5/10G BASE-T1:面向未来L4+自动驾驶和中央计算主干,用于传输海量原始传感器数据。
- 关键增强协议:
- TSN:通过精准时间同步和流量调度,为以太网增加了确定性。它能确保关键控制数据(如转向指令)的延迟低于1ms且不受其他流量干扰,这是以太网能用于实时控制的核心。
3. 应用层中间件:服务与数据的灵魂
在硬件和网络基础之上,软件通过中间件协议实现通信,它们是实现“软件定义汽车”的关键。
| 对比维度 | SOME/IP | DDS |
|---|---|---|
| 核心理念 | 面向服务(SOA)。强调“请求-响应”,服务端与客户端关系明确。 | 以数据为中心(DCPS)。强调“发布-订阅”,数据是核心,发布者和订阅者完全解耦。 |
| 通信模式 | 支持RPC(远程过程调用,即请求/响应)和发布/订阅。 | 核心是发布/订阅,也支持RPC。提供强大的QoS策略(如可靠性、 Durability、Liveliness)。 |
| 适用场景 | 面向服务的应用层通信:如座舱功能(空调、车窗控制)、音视频流控、部分诊断服务。与AUTOSAR Classic深度集成,轻量高效,适合资源有限的控制器。 | 大规模高性能数据分发:如自动驾驶中的传感器原始数据(激光雷达点云、摄像头图像)、高精地图分发、实时状态共享。满足高吞吐、低延迟、强实时要求。 |
| 生态与标准 | 由AUTOSAR规范定义,在传统Tier1和OEM中应用广泛。 | 由OMG定义,在机器人(ROS2)、工业、航天领域成熟,现正被Adaptive AUTOSAR纳入,获得官方支持。 |
| 发展趋势 | 长期共存。SOME/IP将更多用于服务接口定义和传统控制领域;DDS将在高性能计算和自动驾驶领域扮演核心角色。 |
三、总结:一张图看懂车载网络全貌
0 条评论